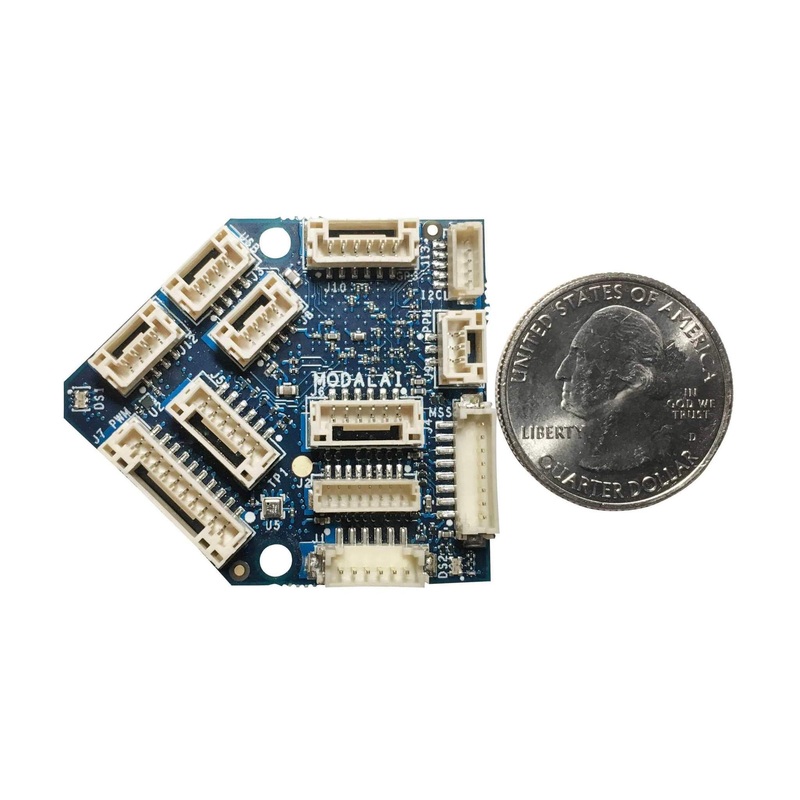
VOXL Flight PX4 is an integrated autopilot that combines:
-
Qualcomm Snapdragon 821 companion computer for Linux, ROS/ROS2, computer vision and AI
-
STM32F765-based PX4 flight controller for stable flight control, sensor fusion and mission execution PX4 Documentation+1
Delivered as a single board, it significantly reduces cabling, weight and reliability issues compared to separate FC + companion computer setups.
Key capabilities:
-
Obstacle avoidance & GPS-denied flight vision-based navigation using multiple image sensors with time-synchronised IMUs PX4 Documentation+1
-
Full PX4 support with manufacturer-maintained branch, UART ESC support and enhanced VIO/VOA features PX4 Documentation
-
Integration with ROS, ROS2, MAVROS, MAVSDK and Docker for advanced autonomy and AI workloads
This makes VOXL Flight PX4 ideal for high-end FPV, kamikaze, interceptor and ISR platforms where you want non-Chinese, PX4-based flight control with strong vision & autonomy.
Note for your site: PX4 docs mark VOXL Flight as discontinued / legacy but still widely used in labs and deployed systems. Good to show it as legacy / dev & special-project autopilot rather than your primary new-design recommendation. PX4 Documentation
Key Features
-
Snapdragon 821 with 4 GB LPDDR4, running Linux Yocto (Docker, OpenCV, ROS, PX4 tools) PX4 Documentation+1
-
Integrated PX4 flight controller (STM32F765, 216 MHz, ARM Cortex-M7) on same PCB PX4 Documentation+1
-
Supports MIPI-CSI2, USB UVC, HDMI cameras; 4K30 capture and 720p FPV video PX4 Documentation
-
Built-in Wi-Fi 802.11ac dual-band + Bluetooth 4.2; optional LTE & Microhard radio modules PX4 Documentation+1
-
Multiple IMUs + barometers for robust sensor fusion (ICM-42688, ICM-20948 / BMI088, BMP280/388) PX4 Documentation+1
-
Supports GPS, RC (PPM/SBUS/Spektrum), CAN, telemetry, LEDs, microSD etc. PX4 Documentation
Technical Specs (compact)
| Section | Spec / Details |
|---|---|
| Total Weight | ~26 g (board) PX4 Documentation |
| CPU / Compute | Snapdragon 821, quad-core up to 2.15 GHz, Adreno 530 GPU, Hexagon cDSP & sDSP PX4 Documentation |
| RAM / Storage | 4 GB LPDDR4, 32 GB UFS 2.0 + microSD slot PX4 Documentation |
| OS / Software | Linux Yocto Jethro + Docker, ROS, PX4, OpenCV, Qualcomm Vision SDK PX4 Documentation+1 |
| Connectivity | Wi-Fi 802.11ac 22, Bluetooth 4.2, optional LTE/Microhard radios PX4 Documentation+1 |
| Flight Controller | STM32F765II (216 MHz M7), PX4 firmware, multiple IMUs + barometer, secure element PX4 Documentation+1 |
| Interfaces (FC side) | GPS/MAG, telemetry, CAN bus, PPM/Spektrum/RC inputs, LEDs, microSD, etc. PX4 Documentation |
| Power | SWaP-optimised, ~310 W typical use (similar to VOXL) AMOV LAB+1 |
Whats Included (Dev Kit variant)
-
VOXL Flight board (CCA, tested)
-
VOXL Power Module v3 Kit (APM)
-
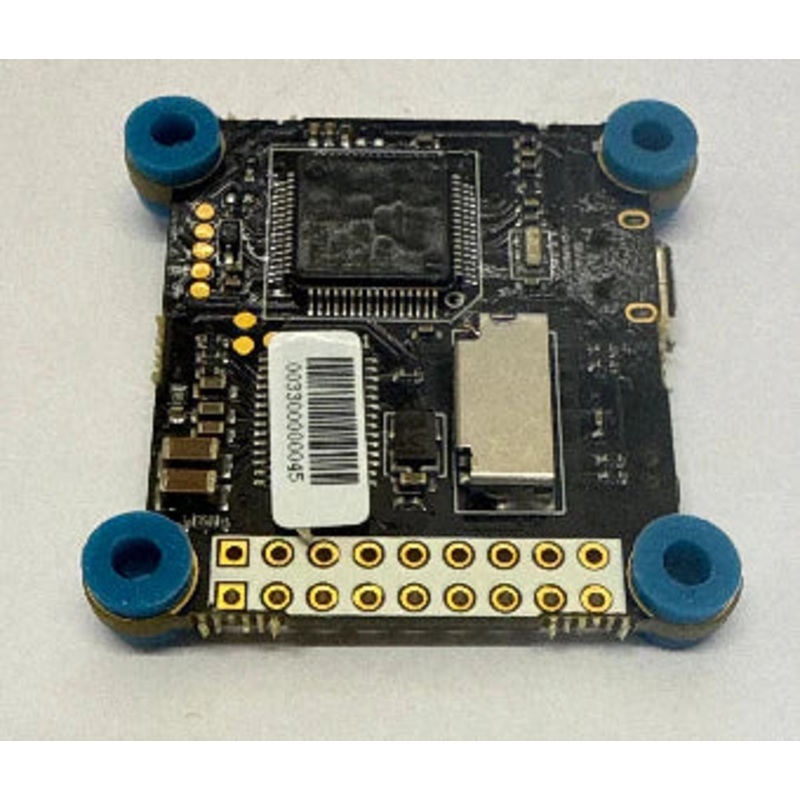
Flight Core PWM breakout kit + cable
-
VOXL Wi-Fi Antenna Kit
-
ESD bags and warning labels
(For Board Only variant, just list the VOXL Flight PCB + ESD packaging.)


Reviews
There are no reviews yet.